




Icefin (RISE-UP)
ICEFIN ROBOT Schmidt
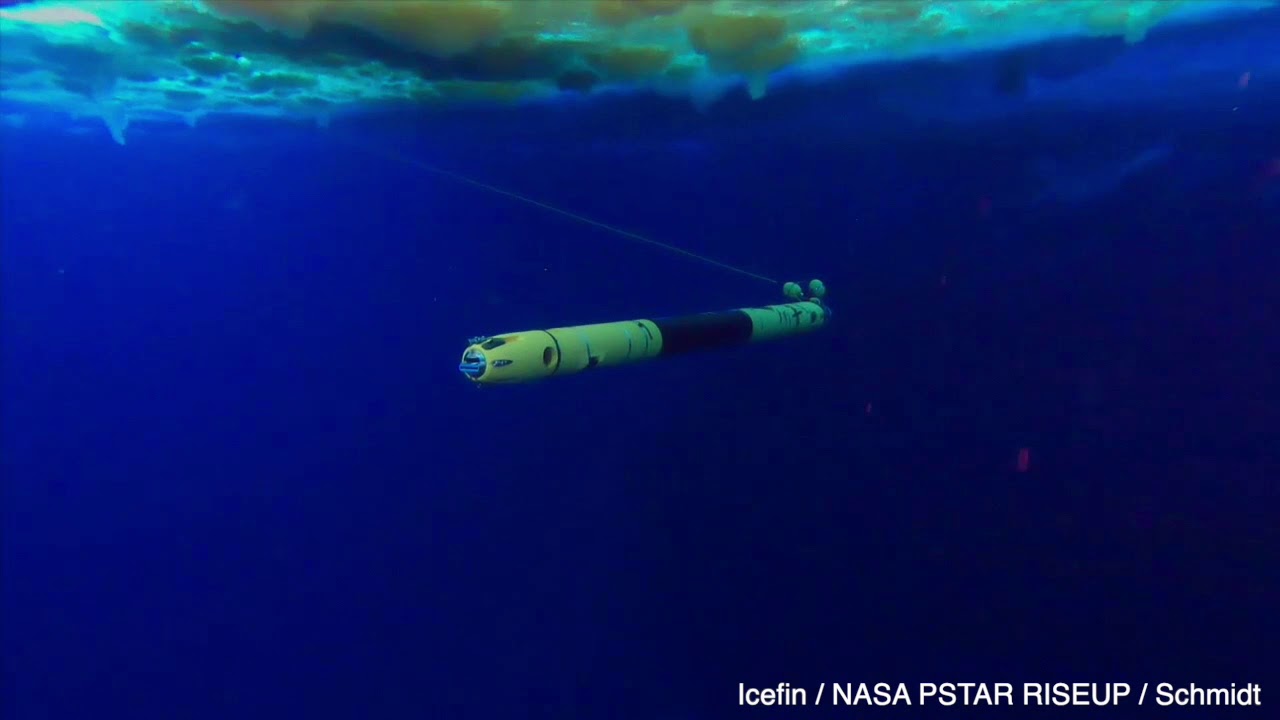
Icefin, a hybrid remote or autonomous underwater vehicle (ROV/AUV), was developed at the Georgia Institute of Technology under the NASA funded RISE UP (Ross Ice Shelf and Europa Underwater Probe) program. Icefin was designed with field portability and modularity for ease of deployment in mind while possessing a diverse suite of instruments to collect oceanographic, biological, and chemical data to characterize Antarctica’s sub ice environments.
Icefin (GTRI)
Icefin carries forward and up/down imaging and sonars and several different sensors. Icefin is also modular, similar to vehicles used on space missions. Scientists can swap sensors or point them in different directions as needed. Traditional GPS does not work under the ice, so Icefin uses a navigation system called SLAM (simultaneous localization and mapping) to triangulate its position based on measuring the range and bearing of features on the seafloor or under the ice.
“Using algorithms such as SLAM allows us to construct a map of the unknown under-ice environment. When you can do that, you can begin to get a 3D picture of what’s going on under the water,” West said. The sensors on Icefin are helping scientists understand how the ocean affects properties of the ice, and how the ice affects properties of the ocean. The exchange between ocean and ice is a process that mediates biology, affects the climate system and controls the stability of glaciers. More images

Vertical Entry Robot for Navigating Europa (VERNE)
(SESAME) Scientific Exploration Subsurface Access Mechanism for Europa SESAME
The Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) technology development opportunity (C.25) supports the formulation and maturation of system concepts and the associated technologies capable of penetrating ice and accessing the subsurface liquid water on ocean worlds such as Europa.
Vertical Entry Robot for Navigating Europa (VERNE) is a mission concept generated by Georgia Tech in response to the SESAME call for proposals. Leveraging experience with Icefin in Antarctica, the project aims to design a vehicle capable of drilling 15 km through Europa’s ice shell within 3 years for a 2030’s mission.
Leveraging Antarctic experience with Icefin and DORA to migrate the terrestrial hardware to a flight-appropriate implementation.
Adapt Icefin to an encapsulated monolithic body with a hybrid thermomechanical drill.
Validated the materials list and integration plan by identifying promising technologies, and technical risks. Conclude with a TRL 4 subsurface access drill design with tested mechanical drilling capability in ice.
